YOLO Network Jupyter Notebook Example¶
In yolo (you only look once) we will have B bounding boxes per pixel. Additionally, the pixels are large and cover the whole image. The pixel in which the center of an object lies is responsible for detecting the object.
Each of the bounding boxes output is defined with 5 numbers: x_center, y_center, width, height, confidence. Confidence is a prediction of IOU
Moreover, each cell predicts a probability distribution over class labels.
Color module¶
Say we have a variable number of colors N, and we want to map to a fixed number of channels M.
We get M convolution filters and we filter each image with each filter, giving us an N x M array of images.
We then apply a softmax to it.
We then do matrix multiplication.
[1]:
import numpy as np
import matplotlib.pyplot as plt
import torch
import os
import sys
import pickle
import time
import random
# %matplotlib notebook
# %matplotlib widget
seed = 42
torch.manual_seed(seed)
np.random.seed(seed)
random.seed(seed)
# Include location of Python source scripts
sys.path.append(os.path.join(os.path.join(os.path.split(os.getcwd())[0]),'scripts'))
Data Exploration¶
Initalize global variables¶
[2]:
nclasses = 3
dtype = torch.float32
cwd = os.getcwd()
pwd = os.path.join(os.path.split(cwd)[0])
print(f'cwd: {cwd}')
print(f'pwd: {pwd}')
cwd: /home/abenneck/Desktop/yolo_model/docs/notebooks
pwd: /home/abenneck/Desktop/yolo_model/docs
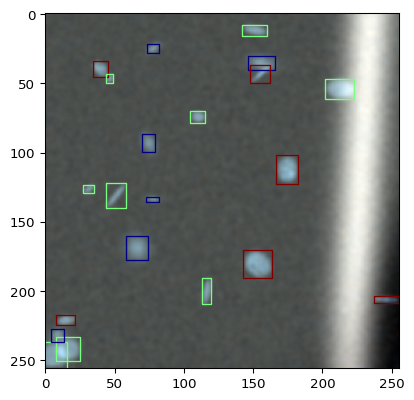
Initialize a dataset of simulated images and visualze a GT example¶
[3]:
from yolo_help import GroundTruthDataset
groundtruth = GroundTruthDataset()
[4]:
from yolo_help import bbox_to_rectangles, imshow
I,bbox,cl = groundtruth[0]
fig,ax = plt.subplots()
imshow(I,ax,cmap='gray')
polys = bbox_to_rectangles(bbox,fc='none')
polys.set_edgecolor(plt.cm.jet(cl*255//(nclasses-1)))
ax.add_collection(polys)
[4]:
<matplotlib.collections.PolyCollection at 0x7d4037949c00>
The YOLO Model¶
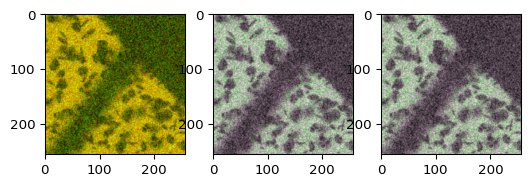
Variable Input Layer Example¶
[5]:
from yolo_help import VariableInputConv2d
layer = VariableInputConv2d(3)
fig,ax = plt.subplots(1,3)
I,bbox,cls = groundtruth[0]
imshow(I,ax[0])
r = torch.randperm(I.shape[0])
out1 = layer(torch.tensor(I,dtype=dtype)[None]).clone().detach()[0]
out2 = layer(torch.tensor(I,dtype=dtype)[r][None]).clone().detach()[0]
imshow(out1,ax[1])
imshow(out2,ax[2])
# note the order of components doesn't matter
Initalize a neural network following the YOLO framework¶
[6]:
from yolo_help import Net
net = Net()
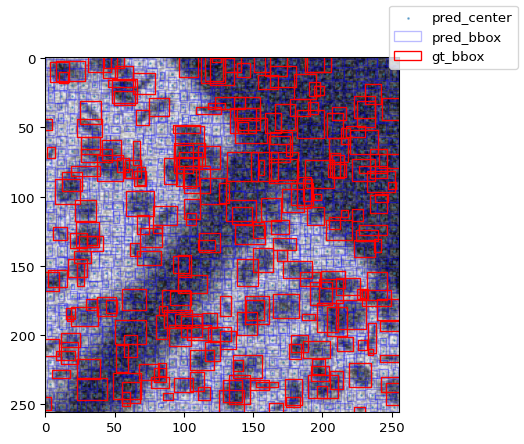
Visualize example output from model¶
[7]:
from yolo_help import convert_data
out = net(torch.tensor(I[None],dtype=dtype))
B = net.B
stride = net.stride
bboxes,data = convert_data(out,B,stride)
fig,ax = plt.subplots()
x = torch.arange(out.shape[-1])*stride + (stride-1)/2
y = torch.arange(out.shape[-2])*stride + (stride-1)/2
YX = torch.stack(torch.meshgrid(y,x,indexing='ij'),0)
ax.imshow(I[0],cmap='gray')
ax.scatter(YX[1].ravel(),YX[0].ravel(),s=1,alpha=0.5)
x = bboxes[...,0]
y = bboxes[...,1]
w = bboxes[...,2]
h = bboxes[...,3]
c = data[...,-1]
predicted_rectangles = bbox_to_rectangles(torch.stack( (x.ravel(),y.ravel(),w.ravel(),h.ravel()) ).T,fc='none',ec='b',alpha=c.clone().detach()*0.5)
ax.add_collection(predicted_rectangles,)
true_rectangles = bbox_to_rectangles(bbox,fc='none',ec='r')
ax.add_collection(true_rectangles,)
fig.legend(['pred_center','pred_bbox','gt_bbox'])
fig.canvas.draw()
Add predicted bounding boxes to above figure¶
[8]:
from yolo_help import get_assignment_inds
# transform the true bounding boxes
# to do this first we need an assignment to a given cell
shape = out.shape
B = net.B
assignment_inds,ious = get_assignment_inds(bboxes,bbox,shape,stride,B)
bboxes_assigned = bboxes[assignment_inds]
x = bboxes_assigned[...,0]
y = bboxes_assigned[...,1]
w = bboxes_assigned[...,2]
h = bboxes_assigned[...,3]
c = data[assignment_inds,-1]
predicted_rectangles = bbox_to_rectangles(torch.stack( (x.ravel(),y.ravel(),w.ravel(),h.ravel()) ).T,fc='none',ec='g',alpha=c.clone().detach())
ax.add_collection(predicted_rectangles,)
[8]:
<matplotlib.collections.PolyCollection at 0x7d40378702b0>
Model Training¶
[ ]:
from yolo_help import train_yolo_model
nepochs = 9854
lr = 1e-4
cls_loss = torch.nn.CrossEntropyLoss(reduction='sum')
resume = True # if True, will load a saved model
modelname = 'modelsave.pt'
optimizername = 'optimizersave.pt'
lossname = 'loss.pt'
outdir_model = os.path.join(cwd,'outputs','models',f'nepochs_{nepochs}')
net = train_yolo_model(nepochs, lr, cls_loss, outdir_model, modelname, optimizername, lossname, verbose=True, resume=resume)
Post-Processing¶
Filter candidate bboxes (best_bbox_per_cell + NMS)¶
[ ]:
from yolo_help import get_best_bounding_box_per_cell
from yolo_post_help import NMS, remove_low_conf_bboxes
def filter_model_outputs(outdir, net, best_bbox_filter = False, low_conf_filter = False, nms_filter = False):
if not os.path.exists(outdir):
print(f'Making new directory {outdir}')
os.makedirs(outdir)
if os.path.exists(os.path.join(outdir, 'all_gt_bbox.pkl')):
# Save the gt_bbox, pred_bbox, and pred_score info for downstream analysis
with open(os.path.join(outdir,'all_gt_bbox.pkl'),'rb') as f:
all_gt_bbox = pickle.load(f)
with open(os.path.join(outdir,'all_pred_bbox.pkl'),'rb') as f:
all_pred_bbox = pickle.load(f)
with open(os.path.join(outdir,'all_scores.pkl'),'rb') as f:
all_scores = pickle.load(f)
with open(os.path.join(outdir,'all_images.pkl'),'rb') as f:
all_images = pickle.load(f)
print(f'Loaded 4 files from {outdir}')
else:
all_pred_bbox = []
all_scores = []
all_gt_bbox = []
all_images = []
nimages_pq = 100
groundtruth = GroundTruthDataset(reproducible = True)
for i, gt in enumerate(groundtruth):
# Quantify the model's performance against 'nimages_pq' simulated gt images
if i >= nimages_pq:
break
# Initialize gt objects (bbox: [cx, cy, w, h, conf])
I,bbox,cls = gt
print(f'=== Starting groundtruth[{i}] ({len(bbox)} bboxes) ===')
# Get model outputs for the ith image in the gt dataset
out = net(torch.tensor(I,dtype=dtype)[None])
bboxes,data = convert_data(out,net.B,net.stride)
scores = data[:,-1]
print(f'{len(bboxes)} bboxes output from model')
bboxes_, scores_ = bboxes, scores
# Reduces # of guesses by factor of 2
if best_bbox_filter:
start = time.time()
bboxes_,scores_ = get_best_bounding_box_per_cell(bboxes,scores.clone().detach(),net.B)
print(f'{len(bboxes_)} bboxes after getting best bbox per cell; Finished in {time.time() - start:.2f}s')
# Remove bounding boxes below some conf threshold
if low_conf_filter:
start = time.time()
bboxes_, scores_ = remove_low_conf_bboxes(bboxes_, scores_)
print(f'{len(bboxes_)} bboxes after removing low conf bboxes; Finished in {time.time() - start:.2f}s')
# Perform NMS on filtered guesses (Reduce by a factor of ~2
if nms_filter:
start = time.time()
bboxes_,scores_ = NMS(bboxes_, scores_, nms_threshold = 0.9)
print(f'{len(bboxes_)} bboxes after NMS; Finished in {time.time() - start:.2f}s\n')
# Append outputs from current image to all outputs for downstream performance quantification and visualization
all_gt_bbox.append(bbox)
all_pred_bbox.append(bboxes_)
all_scores.append(scores_)
all_images.append(I)
# Save the gt_bbox, pred_bbox, and pred_score info for downstream analysis
with open(os.path.join(outdir,'all_gt_bbox.pkl'),'wb') as f:
pickle.dump(all_gt_bbox,f)
with open(os.path.join(outdir,'all_pred_bbox.pkl'),'wb') as f:
pickle.dump(all_pred_bbox,f)
with open(os.path.join(outdir,'all_scores.pkl'),'wb') as f:
pickle.dump(all_scores,f)
with open(os.path.join(outdir,'all_images.pkl'),'wb') as f:
pickle.dump(all_images,f)
print(f'Saved output .pkl files to {outdir}')
return all_pred_bbox, all_scores, all_gt_bbox, all_images
# Load filtered outputs, or generate new ones if none exist in outdir
outdir_data = os.path.join(cwd,'outputs','data',f'nepochs_{nepochs}_raw')
all_pred_bbox, all_scores, all_gt_bbox, all_images = filter_model_outputs(outdir_data, net)
Compare GT bounding boxes with filtered estimated bounding boxes¶
[ ]:
nrow = 50
ncol = 2
fig, axs = plt.subplots(nrow, ncol, layout = 'tight')
i,j = 0,0
for idx, I in enumerate(all_images):
pred_bb = all_pred_bbox[idx]
pred_s = all_scores[idx]
gt_bb = all_gt_bbox[idx]
imshow(I, axs[i,j], cmap = 'gray')
gt_polys = bbox_to_rectangles(np.asarray(gt_bb),fc='none')
gt_polys.set_edgecolor('blue')
axs[i,j].add_collection(gt_polys)
# imshow(I,axs[i,j],cmap='gray')
pred_polys = bbox_to_rectangles(np.asarray(pred_bb),fc='none')
pred_polys.set_edgecolor('red')
axs[i,j].add_collection(pred_polys)
j += 1
if j > ncol - 1:
j = 0
i += 1
fig.legend(['gt','pred'])
fig.set_size_inches(ncol*3,nrow*3)
plt.show()
PR Curve Generation¶
[ ]:
import importlib as imp
import yolo_post_help
imp.reload(yolo_post_help)
from yolo_post_help import compute_pr_curves, plot_pr_curves, get_mAP
all_pred_bbox, all_scores, all_gt_bbox, all_images = filter_model_outputs(outdir_data, net)
all_pred_bbox, all_scores, all_gt_bbox, all_images = [all_pred_bbox[0]], [all_scores[0]], [all_gt_bbox[0]], [all_images[0]]
out = compute_pr_curves(all_gt_bbox, all_pred_bbox, all_scores, outdir_data, verbose = True)
fig, axs = plot_pr_curves(out)
fig, axs = plot_pr_curves(out, condense = False)
mAP = get_mAP(out)
print(f'mAP: {mAP}')
# TODO: Only compute (p,r) if there is a score below conf_thresh. Otherwise, all tp/fp/fn labels remain the same (Should save <10min on first 10)
[ ]:
all_pred = [[0.112,0.8,0.61],[0.4,0.1],[0.99]]
all_pred_ravel = np.asarray([elem for small_arr in all_pred for elem in small_arr])
conf_threshold = [round(x,2) for x in list(np.arange(0.01,1.0,0.01))]
# np.asarray(conf_threshold) > np.min(all_pred_ravel)
min_score_below_conf = conf_threshold < np.min(all_pred_ravel)
[ ]:
np.min(all_pred_ravel)
Daniel’s PR Code¶
[ ]:
# from yolo_help import iou
# fig,ax = plt.subplots(2,2)
# ax = ax.ravel()
# ax1 = ax[1]
# ax2 = ax[2]
# ax3 = ax[3]
# ax = ax[0]
# hfig = display(fig,display_id=True)
# groundtruth = GroundTruthDataset(reproducible = True)
# iouthresh = 0.7
# thresholds = np.linspace(0,1,100)
# # we consider all the detections made by our model
# tp = np.zeros(len(thresholds)) # our model output matches a true bbox (and no other output matches it better)
# fp = np.zeros(len(thresholds)) # our model output is not the best match for a true bbox
# tppfn = np.zeros(len(thresholds)) # denominator in recall is just the number of true boxes
# for i, gt in enumerate(groundtruth):
# ax.cla()
# I,bbox,cls = gt
# imshow(I,ax)
# gtrect = bbox_to_rectangles(bbox,facecolor='none',ec='b')
# ax.add_collection(gtrect)
# with torch.no_grad():
# out = net(torch.tensor(I[None],dtype=dtype))
# bboxes,data = convert_data(out,net.B,net.stride)
# scores = data[:,-1]
# bboxes_,scores_ = bboxes,scores
# prrect = bbox_to_rectangles(bboxes_,facecolor='none',ec='r',ls=':',alpha=scores_)
# ax.add_collection(prrect)
# # loop through the ground truth
# for j,t in enumerate(thresholds):
# if torch.any(scores_>t):
# bboxes__ = bboxes_[scores_>t]
# # we need to find which ones in bboxes__ are matched ot which ones in in bbox
# # and we need to know how many are left over in each set
# # we need to make sure that this assignment is 1-1, or we're essentially double coun
# ious = iou(bboxes__,bbox)
# # for each true bbox, find the besta match
# inds = torch.argmax(ious,0)
# maxious = torch.amax(ious,0)
# # count a true positive if the above maxious are greater than the thresh
# # there can be at most len(bbox)
# ind0 = np.argmax(ious,0)
# ind1 = np.argmax(ious,1)
# # only count the goodinds
# goodinds = ind1[ind0] == torch.arange(len(ind0))
# ntp = (maxious[goodinds]>iouthresh).sum()
# tp[j] += ntp
# # every single other detection is a false positive
# # if it was output by my model and exceeded the score threshold
# # sometimes this is less than 0!
# nfp = len(bboxes_[scores_>t])-ntp
# fp[j] += nfp
# # true positive plus false positive is the total number of detections
# # then we just need the total numberof true ones for recall (true positive + false negative)
# tppfn[j] += bbox.shape[0]
# else:
# # if t == 1, then there will be no scores > t and the above will give errors
# tp[j] += 0
# fp[j] += 0
# tppfn[j] += bbox.shape[0]
# # recall will be 0,
# # precision will be 0/0
# precision = tp / (tp+fp)
# precision[np.isnan(precision)] = 1
# recall = tp / tppfn
# mean_precision = np.abs(np.sum( np.diff(recall)*(precision[1:]+precision[:-1])/2 ))
# ax1.cla()
# ax1.plot(recall,precision,marker='.')
# ax1.scatter(recall[0],precision[0],c='r')
# ax1.scatter(recall[-1],precision[-1],c='g')
# ax1.set_xlim(0,1)
# ax1.set_ylim(0,1)
# ax1.set_xlabel('Recall')
# ax1.set_ylabel('Precision')
# ax2.cla()
# ax2.set_title('Total TP over epoch')
# ax2.plot(tp,marker='.')
# ax3.cla()
# ax3.set_title('Total FP over epoch')
# ax3.plot(fp,marker='.')
# fig.canvas.draw()
# hfig.update(fig)